Three-dimensional finite element modelling of skeletal muscles: Parameter identification, simulation and verification (DFG SI841/3-1, 3-2)
This project will be performed in cooperation with Prof. Markus Böl (TU-Braunschweig, Link).
Skeletal muscles are tight packed inside the body (e.g. calf) and interact with surrounding muscle tissue, thus a free deformation is impossible. The intramuscular transfer of forces in longitudinal and transversal direction influences the force development and deformation of single muscles (Siebert et al. 2012a, Siebert et al. 2012b). Maybe this fact complicates muscle coordination and a sophisticated force development. However, in daily routine muscles have to accomplish complex movements. In order to get a deeper understanding of muscle package under the premise of force and velocity generation, analyses of muscle architecture, three-dimensional deformation and force development of muscle package are necessary.
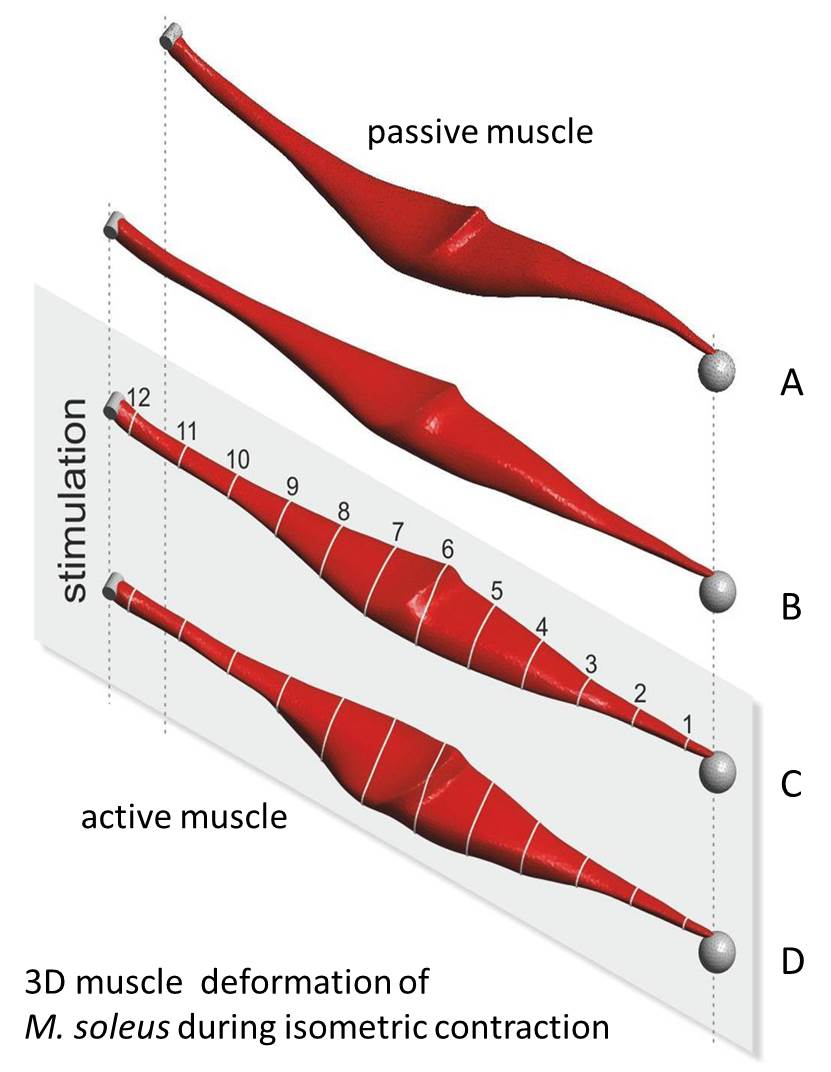
Based on the preliminary work including the three-dimensional modelling of the soleus muscle (SOL), the focus of this application is set on the description of a muscle package (SOL, gastrocnemius muscle (GM), plantaris muscle (PLA)). Supposing a close linkage between experiment and simulation, three successive work packages are planned. In work package 1 still outstanding experimental works as well as model validation steps need to be finished for the SOL. The muscle architecture, fibre distribution, and the contraction behaviour of the GM are much more complex compared to the SOL. Having this in mind, in work package 2 the proposed modelling approach is validated on experimental data of the GM. Work package 3 focuses on the development and validation of the first three-dimensional model muscle package (SOL, GM, PLA).
To realise the aforementioned aims, specific experiments for the determination of mechanical characteristics as well as structural parameters of the GM and PLA have to be arranged. This includes the determination of the active muscle properties, the passive and dynamic tissue characteristics (Böl et al. 2012), and the three-dimensional muscle architecture (Schenk et al. 2013). Further, the proposed modelling approach needs to be enhanced in order to describe muscle fatigue and history effects (Till et al. 2008, Till et al. 2010, Rode et al. 2008). To model the interaction between neighbouring muscles, experiments are planned to specify the force transfer. A basic requirement for the validation process is the combination between the determination of muscle force and three-dimensional muscle shape deformation (using optical measurement systems) for single muscles (Böl et al. 2012) as well as for the whole muscle package.
In future work, the use of such muscle package models can give fundamental answers e.g. to questions concerning muscle function or arrangement. This includes the consideration of the whole requirement on the system for a specific movement. Focusing on medical sciences, models of muscle packages can be used to optimise surgery techniques or the statement of functional consequence of medical surgeries at neuro-muscular diseases. Based on prognoses on local pressures and stress concentration statements on blood circulation or on the localisation of micro traumata at excentric loads are possible.
- Siebert T, Leichsenring K, Rode C, Wick C, Stutzig N, Schubert H, Blickhan R & Bol M. (2015). Three-Dimensional Muscle Architecture and Comprehensive Dynamic Properties of Rabbit Gastrocnemius, Plantaris and Soleus: Input for Simulation Studies. PLoS ONE 10, e0130985. [link]
- Böl M, Leichsenring K, Ernst M, Wick C, Blickhan R & Siebert T. (2015). Novel microstructural findings in M. plantaris and their impact during active and passive loading at the macro level. J Mech Behav Biomed Mater 51, 25-39. [link]
- Hiepe P, Herrmann KH, Gullmar D, Ros C, Siebert T, Blickhan R, Hahn K & Reichenbach JR. (2014). Fast low-angle shot diffusion tensor imaging with stimulated echo encoding in the muscle of rabbit shank. NMR Biomed 27, 146-157. [link]
- Schenk P, Siebert T, Hiepe P, Gullmar D, Reichenbach JR, Wick C, Blickhan R & Bol M. (2013). Determination of three-dimensional muscle architectures: validation of the DTI-based fiber tractography method by manual digitization. J Anat. Doi: 10.1111/joa.12062. [link]
- Böl M, Leichsenring K, Weichert C, Sturmat M, Schenk P, Blickhan R & Siebert T. (2013). Three-dimensional surface geometries of the rabbit soleus muscle during contraction: input for biomechanical modelling and its validation. Biomech Model Mechanobiol. Doi: 10.1007/s10237-013-0476-1. [link]
- Siebert T, Günther M & Blickhan R. (2012a). A 3D-geometric model for the deformation of a transversally loaded muscle. J Theor Biol 298, 116-121. [link]
- Böl M, Schmitz A, Nowak G & Siebert T. (2012). A three-dimensional chemo-mechanical continuum model for smooth muscle contraction. J Mech Behav Biomed Mater 13C, 215-229. [link]
- Siebert T, Till O & Blickhan R. (2012). Work partitioning of transversally loaded muscle: experimentation and simulation. Comput Methods Biomech Biomed Engin , 1-13. [link]
- Böl M, Kruse R, Ehret AE, Leichsenring K & Siebert T. (2012). Compressive properties of passive skeletal muscle-The impact of precise sample geometry on parameter identification in inverse finite element analysis. J Biomech 45, 2673-2679. [link]

Tobias Siebert
Prof. Dr.
Norman Stutzig
PD Dr. habil.